

Я так и не получил товар, так как продавец его так и не отправил. Я оплатил ускоренную доставку и ждал посылку еще 20 дней. Продавец так и не обновил информацию об отслеживании в течение 15 дней, но когда я отправил им сообщение, они заявили, что посылка уже доставлена. Я открыл спор, а продавец продолжал утверждать, что посылка была доставлена. Только после вмешательства Aliexpress продавец изменил отправку на статус “для отмены доставки”. На 20-й день после заказа я получил возмещение через спор. Излишне говорить, что я зол и уже на 20 дней отстаю от своего проекта.
(2 Отзывы)
32-канальный сервоконтроллер SSC32-V2.5 с интерфейсом USB XBEE подходит для ПК MAC LINUX для шестигранных роботов-пауков и двуногих роботов
2 098.42₽
4 035.45₽
s
Размер:
32-канальный Сервоконтроллер SSC32-V2.5 с интерфейсом USB XBEE подходит для ПК MAC LINUX для шестигранных роботов-пауков и двуногих роботов
Сервоконтроллер SSC32-V2.5 - это многоканальный контроллер, специально разработанный для шестигранных роботов-пауков и двуногих роботов.
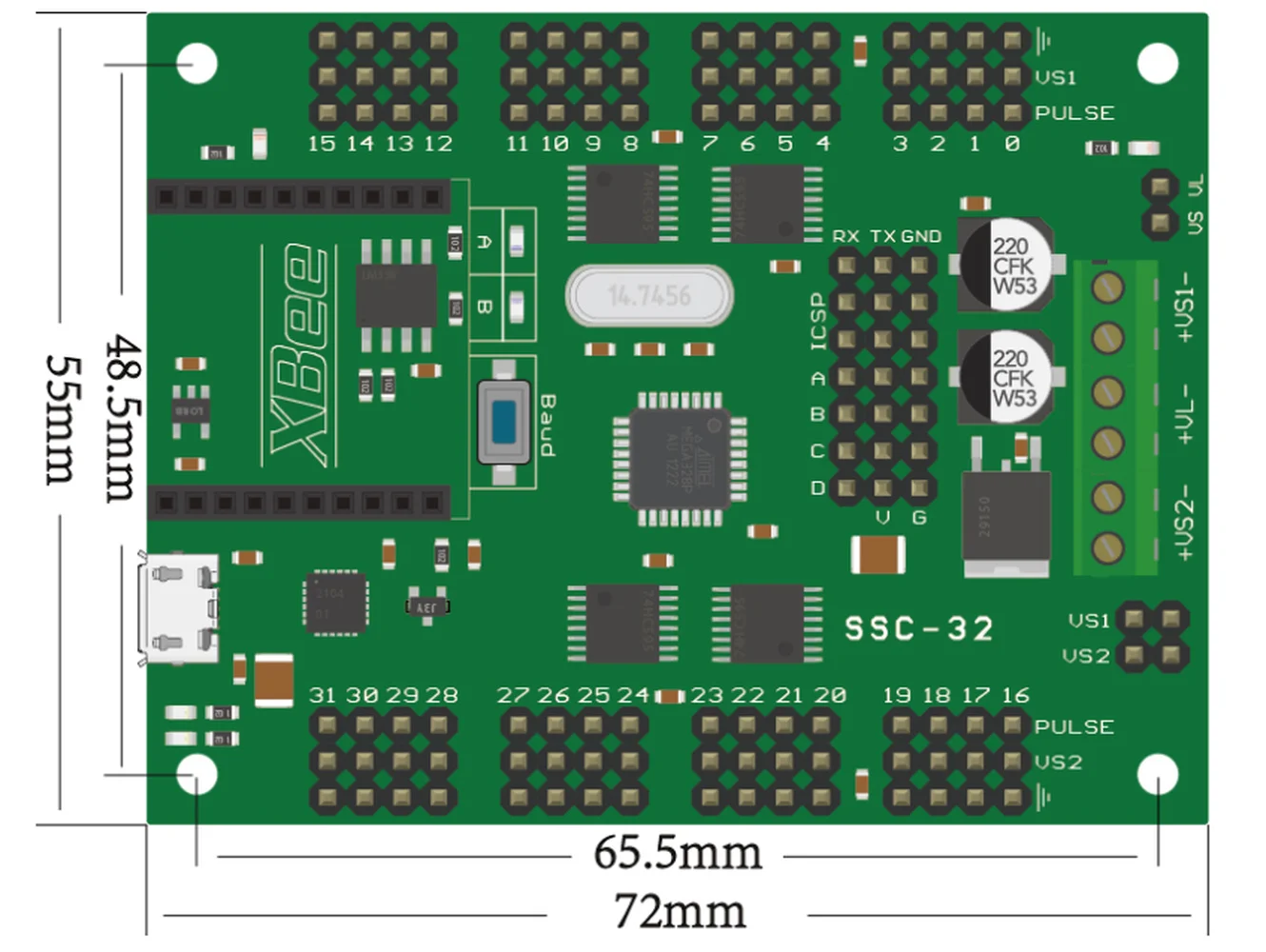
По сравнению с 32-канальным сервоконтроллером, он имеет меньший объем и может быть встроен в текущую систему.
Контроллер оснащен интерфейсом USB, который может напрямую взаимодействовать с ПК, MAC, LINUX и другими системами.
Кроме того, добавлен интерфейс XBEE, который может быть подключен к XBEE, или модуль Bluetooth, совместимый с выводами XBEE, для обеспечения беспроводной удаленной отладки и управления.Режимы управления контроллером рулевого механизма включают управление в режиме реального времени, синхронизацию, фиксированную скорость и т.д., Которые полностью совместимы с управляющим программным обеспечением LYNXMOTION.
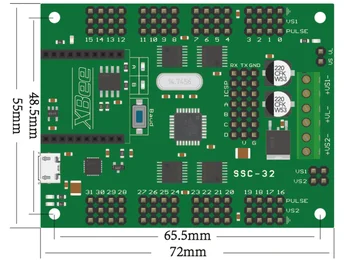
① Индикатор мощности;
② Индикатор передачи данных микросхемы последовательного порта мигает, когда она взаимодействует с компьютером:
③ Индикатор стандартного модуля XBEE.Когда для передачи данных используется коммуникационный модуль XBEE, RSSI используется в качестве индикатора приема данных.Разные режимы мигания соответствуют разным состояниям.Для получения подробной информации, пожалуйста, обратитесь к руководству XBEE:
④ Индикатор скорости передачи в бодах контроллера работает, вы можете ввести настройку, долго нажимая кнопку передачи в бодах, шаги аппаратной настройки скорости передачи в бодах по умолчанию 115200 БОД
1. Нажмите и удерживайте кнопку передачи данных в бодах, загорится светодиодный индикатор, показывающий текущую скорость передачи данных в бодах.
Горит индикатор A означает 9600, горит индикатор B означает 38400.
Индикаторы A и B загораются одновременно 115200 (по умолчанию)
2. Через 2 секунды светодиод начнет попеременно мигать, указывая на то, что вы можете изменить скорость передачи в бодах.
3. Отпустите кнопку.
4. Нажмите кнопку, чтобы переключиться между скоростями передачи в бодах, указанными на шаге 1.
5. После выбора требуемой скорости передачи в бодах не выполняйте никаких операций; через 5 секунд светодиодный индикатор вернется в обычный режим, и новая скорость передачи в бодах будет записана в EEPROM.
Типы устройств, поддерживаемые интерфейсом расширения XBEE, включают следующие два:
1. Модуль Bluetooth и модуль XBEE с расположением контактов XBEE
2. Другие радиочастотные модули RF с расположением контактов XBEE
Пожалуйста, обратите внимание на направление вставки XBEE при использовании, вырез соответствует изображению выше.
Подключение к ARDUINO
При подключении к ARDUINO TX платы сервоуправления подключается к номеру 0; RX подключается к номеру 1: GND подключен.
Напишите пример кода, рулевое управление будет переключаться из положения 750US в положение 2250Us и выполняться повторно.
АННУЛИРУЙТЕ НАСТРОЙКУ ()
ПОСЛЕДОВАТЕЛЬНЫЙ.BEGIN(115200); // Совпадает с фактической скоростью передачи данных 32-позиционного сервоконтроллера
VOID LOOP()
1/ Сервопривод подключен к порту 0
ПОСЛЕДОВАТЕЛЬНЫЙ.PRINTLN("#OP750T500); // #0 сервопривод перемещается в положение 750Us
ЗАДЕРЖКА (1000);
ПОСЛЕДОВАТЕЛЬНЫЙ.PRINTLN("#OP2200T500"); // #0 сервопривод перемещается в положение 2200Us
- Колесная база: Винты
- Атрибуты полного привода: Сборка
- Радиоуправляемые детали и аксессуары: Разъемы/проводка
- Происхождение: Материковый Китай
- Технические параметры: Стоимость 4
- Количество: 1 шт.
- Название бренда: zhizicathy
- Для типа транспортного средства: Самолеты
- Использование: Транспортные средства и игрушки с дистанционным управлением
- Периферийные устройства дистанционного управления: 32-канальный сервоконтроллер SSC32-V2.5
- Обновленные детали / аксессуары: 32-канальный сервоконтроллер SSC32-V2.5
- Материал: Композитные материалы
- Принадлежности для инструментов: Инструменты
- Рекомендуемый возраст: 14+y
- Размер: 72x55mm
- Номер модели: 32-канальный сервоконтроллер SSC32-V2.5
Отзывы
Рад, что сделал повторный заказ у этого продавца, так как знал, что товар будет хорошим. Просто жаль, что он не пришел с первого раза.
Сопутствующие товары
Похожие

набор кухонных игрушек для девочек, игрушки для приготовления пищи, детские режущие фрукты, кухонная утварь, детское имитационное образование, ролевые игры
тренировка способностей: зрение, интеллектуальное развитие,
Набор Кухонных Игрушек Для Девочек, Игрушки Для Приготовления Пищи, Детские Режущие Фрукты, Кухонная Утварь, Детское Имитационное Образование, Ролевые Игры
228.56₽
Похожие

1,2 г 8 вт высокомощный беспроводной аналоговый видеопередатчик 12-канальный приемник fpv-системы передачи для радиоуправляемых моделей самолетов-бпла параметр передатчика: рабочая частота: hc1: 1080 hc2: 1120 hc3: 1160 hc4: 1200hc5: 1240hc6:
Высокомощный беспроводной аналоговый видеопередатчик 1,2 Г 8 Вт, 12-канальный приемник, система передачи FPV для радиоуправляемых моделей самолетов-БПЛА
1 907.51₽
3 815.12₽
Похожие

описание продукта:
название модели: 2014 mustang street racer silver
марка модели: maisto
масштаб модели: 1/24
материал: пластик, сплав, резина
размер модели:19.4*7.4* 5.6 см
размер цветной коробки: 24,5*13*11 см
-разница
Maisto1: 24 Масштаб 2014 Mustang Street Racer Серебряный имитационный сплав, литье под давлением, коллекция моделей американских спортивных автомобилей, игрушка в подарок
2 077.03₽
2 596.29₽
Похожие

4x серебристая # 45 стальная черная железная ось колеса для радиоуправляемой модели автомобиля 1/10 hsp 94122/94177
количество в упаковке: 4шт
описание: колесная ось из серебристого # 45 стального черного железа для 1: 10
4шт стальная колесная ось HSP 08064 для 94188 94170 Багги грузовик 1/10 R/C модель автомобиля
23.21₽
44.60₽
Похожие

добро пожаловать на оптовую продажу и прямую доставку.
мы предоставим выгодную цену и отличный сервис.
если у вас есть какие-либо вопросы, пожалуйста, не стесняйтесь обращаться к нам.
информация о продукте:
производитель:
5 шт./лот Дисней Микки Алюминиевый пленочный воздушный шар Игрушки Аниме Микки Минни Модель Куклы Фигурки Украшения для детского Дня Рождения Принадлежности для вечеринок
33.05₽
55.08₽
Похожие

Похожие
Похожие

характеристики:
материал: металл
для: грузовика tamiya с дистанционным управлением в масштабе 1/14 benz actros aros 3363 1851 3348
код: vjx223
в комплект входит: 1x фланелевое украшение водительского сиденья
Фланелевое Украшение Водительского сиденья для Грузовика Tamiya с Дистанционным Управлением в масштабе 1/14 Benz Actros Aros 3363 1851 3348
61.60₽
75.08₽
Похожие

описание товара
материал товара: пвх
состояние: 100% новый
размер: около 10 см
упаковка: в сумке
4шт 10 см Диснеевская принцесса Аниме Белль Белоснежка Ариэль Золушка Фигурка Коллекционная Модель Детские Игрушки
26.74₽
33.37₽
Похожие

100% абсолютно новый и высококачественный.материал: мягкий плюш и полипропиленовый хлопок.
размер: 28/35 см
упаковка: 1 штука в одном полиэтиленовом пакете.
дорогой друг, мы можем предложить прямые поставки
1шт 28/35 см Кавайный павлин с синей короной, плюшевые игрушки, реалистичные животные, яркие красочные плюшевые куклы, игрушки для домашнего декора
122.14₽
152.73₽
Похожие
тот же фирменный набор
Аниме Tanabata Moonfall PR Set Редкая Флеш-карта Ган Ю Мисака Микото Яэ Мико Коллекция Игр Открытка Рождественский Подарок На День Рождения
229.09₽
305.46₽
Похожие

особенности: наполнитель: плюш
наполнитель: полипропиленовый хлопок
предупреждение: не съедобен
примечания
1. размер изделия измеряется вручную, допускается погрешность в 1-3 см, пожалуйста, обратитесь
35/45/55 см Disney Kawaii Monsters University Салливан Плюшевая Игрушка Подушка Мультфильм Аниме Мягкие Куклы Игрушки Для Детей Подарки На День Рождения
210.59₽
Похожие

технические колеса, гусеница, направляющая гусеницы для wpl e-1 1/16 запчасти для модернизации бака с дистанционным управлением, комплект запасных аксессуаров 100% абсолютно новый
изготовлен из высококачественного
Технические колеса, гусеница, направляющая гусеницы для WPL E-1 1/16, Запчасти для модернизации бака с дистанционным управлением, комплект запасных аксессуаров
279.25₽
372.30₽
Похожие
материал изделия: полиуретановый материал, похожий на каучук, безопасный материал, обеспечивающий отсутствие травм во время игры
состояние: 100% новый
размер: приблизительно 93 см * 33 см
упаковка: пластиковый
Топор для жертвоприношения боевого зверя FC Big Axe 93 см, реквизит для косплея, оружие для ролевых игр, пиратский призрачный топор, безопасная игрушка-модель оружия PU 1: 1
300.22₽
Похожие

100% абсолютно новый.
материал из алюминиевого сплава обладает хорошей теплопроводностью, и он оснащен охлаждающим вентилятором с сильным светодиодным ветром для лучшего охлаждающего эффекта.
изготовлен из
Металлический Радиатор Двигателя Охлаждающего Вентилятора со Светодиодной Подсветкой для Обновления Деталей И Аксессуаров 1/8 Traxxas Sledge RC Car, Красный
156.47₽
256.47₽